Le robot se déplace en roulant. en évitant les zones noires du tapis. Il doit pouvoir se déplacer en ligne droite ou pivoter à 90°. Mais selon les robots, ces deux actions sont difficiles à obtenir car les 2 moteurs qui permettent les déplacements n’ont pas un fonctionnement identique. Cela rend le déplacement en ligne droite quasiment impossible. Pour remédier à ce problème il faut utiliser 4 stratégies :
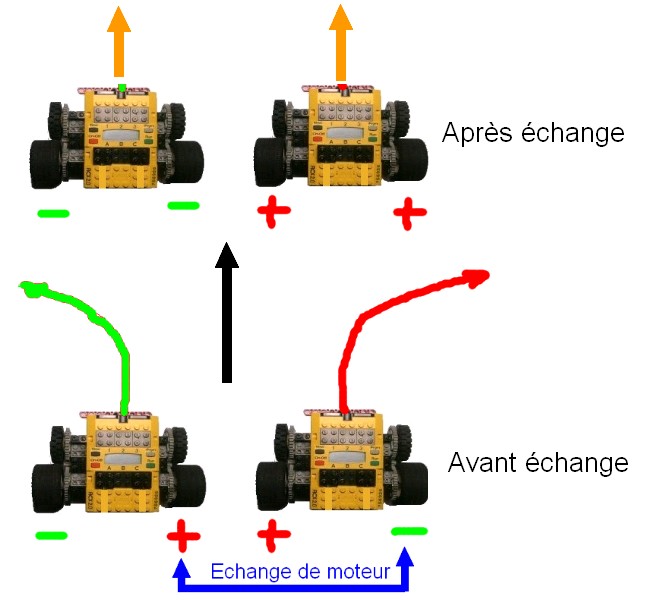
Stratégie 1 : Échange de moteurs entre deux robots.
– Tout d’abord tester chaque robot en lançant le programme 1 (AVANCE tout droit).
- Si tout va bien, le robot se déplace tout droit. On conserve ce robot.
- Si le robot se déplace plutôt vers la droite, c’est que son moteur droit est plus faible que le moteur gauche.
- Si le robot se déplace plutôt vers la gauche, c’est que son moteur gauche est plus faible que le moteur droit.
– Répartir les robots : à droite, ceux qui vont à droite et à gauche ceux qui vont à gauche.
– échanger les moteurs droits d’un robot qui va à gauche et d’un robot qui va à droite.
– Le résultat : 2 robots qui vont plutôt beaucoup plus droit.
– Continuer les échanges de moteurs des autres robots.
Stratégie 2 : Modification de la structure du robot pour suivre les bords de la table.
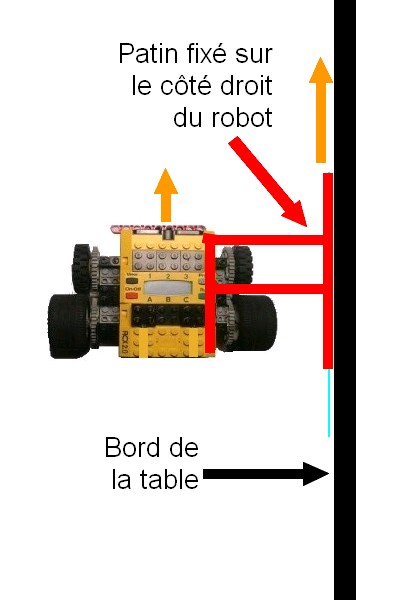
– Le robot peut s’aider du bord de la table pour se déplacer. Il se déplace ainsi en glissant le long du bord de la table. Il suffit de fabriquer une structure autour du robot ou un rail sur un de ses côtés.
Stratégie 3 : Modification de la structure du robot pour se recaler contre le bord de la table.
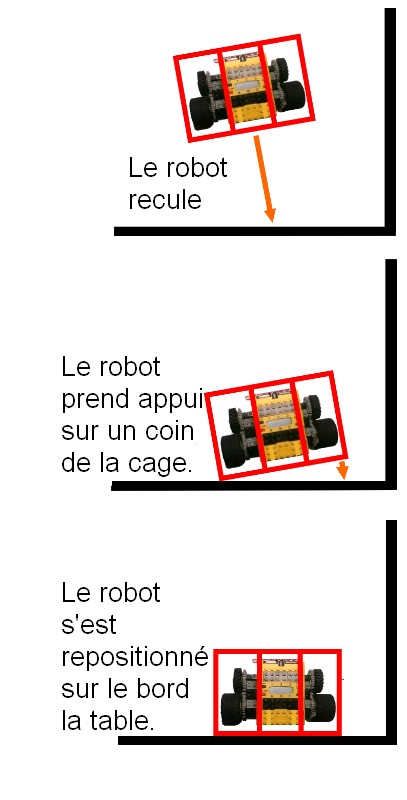
– Le robot s’il ne va pas droit, peut se recaler contre un des bords de la table.
– Il suffit de fabriquer une structure autour du robot ou un pare-choc à l’arrière du robot.
– Ce pare-choc peut être un détecteur de contact.
– S’il y a contact, cela veut dire que l’arrière du robot est en contact avec un des 4 bords de la table. Il peut redémarrer en marche avant sans être désaxé.
Stratégie 4 : Utilisation d’un détecteur de lumière pour détecter les zones noires du tapis.
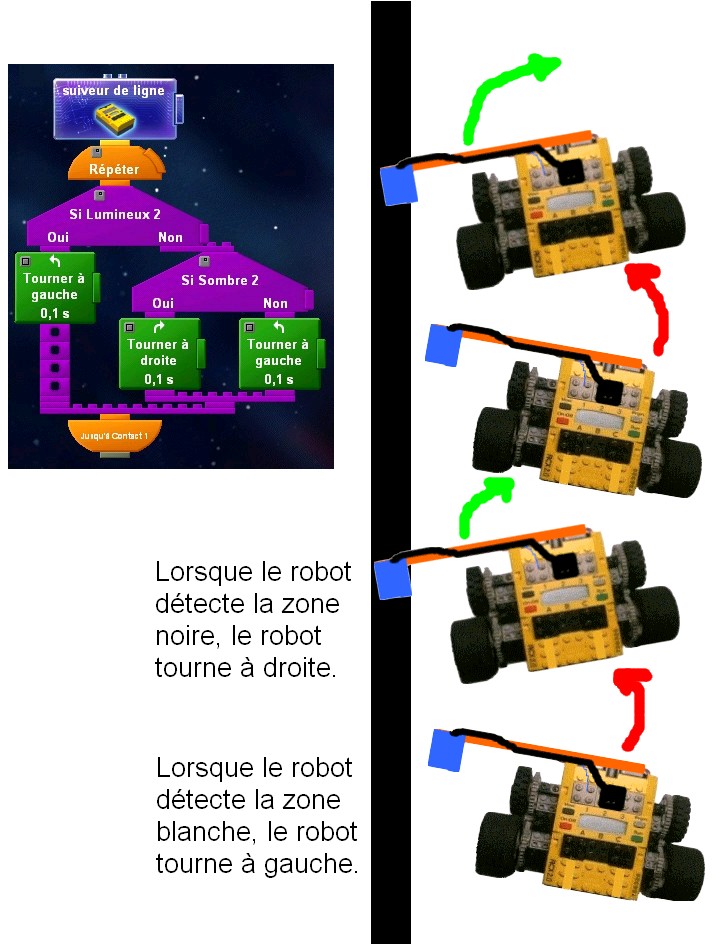
– Le robot ne doit pas traverser les zones noires de la table.
– S’il est doté d’un détecteur de lumière dirigé vers le sol, il peut détecter ces zones et tourner pour les éviter. Ainsi il peut avoir un déplacement en zigzag à côté de ces zones.
– Ainsi en programmant le robot pour avancer ou tourner lorsqu’il détecte une zone sombre, il peut se déplacer correctement.